
ESA is Testing a Modular Multipurpose Rover that Could Be a Science Lab or a Tiny Bulldozer
By Evan Gough
Most rovers have been built for Mars, and each one of them is a complex machine designed with specific goals and terrains in mind. But the Moon is different than Mars. We’re not searching for life there; we’re trying to establish a presence.
In recognition of the difference, the ESA is developing modular rovers that can serve different needs with only small modifications.
It’s called the European Moon Rover System (EMRS), and its goal is to “develop a versatile surface mobility solution for future lunar missions,” according to newly published papers. The surface mobility systems will serve four upcoming ESA missions: the Polar Explorer (PE), In-Situ Resource Utilization (ISRU), Astrophysics Lunar Observatory (ALO) and Lunar Geological Exploration Mission (LGEM).
Each of the four missions has specific requirements, including placing scientific instrumentation at the lunar south pole, excavating and transporting over 200 kg (440 lbs) of regolith, building an astrophysical observatory on the far side of the Moon, and studying the Moon’s volcanic history. The ESA is developing a rover that uses modularity to meet each goal rather than a completely different rover.

“To achieve this, a modular approach has been adopted for the design of the platform in terms of locomotion and mobility, which includes onboard autonomy,” the paper explains.
There are obvious benefits to modularity and its offshoot, redundancy. Modular payloads can be used more advantageously for the specific mission at hand. They can also be removed and added as the need arises and are less time-consuming to work on and develop. And if one rover is out of commission for some reason, payloads can be swapped according to changing priorities.
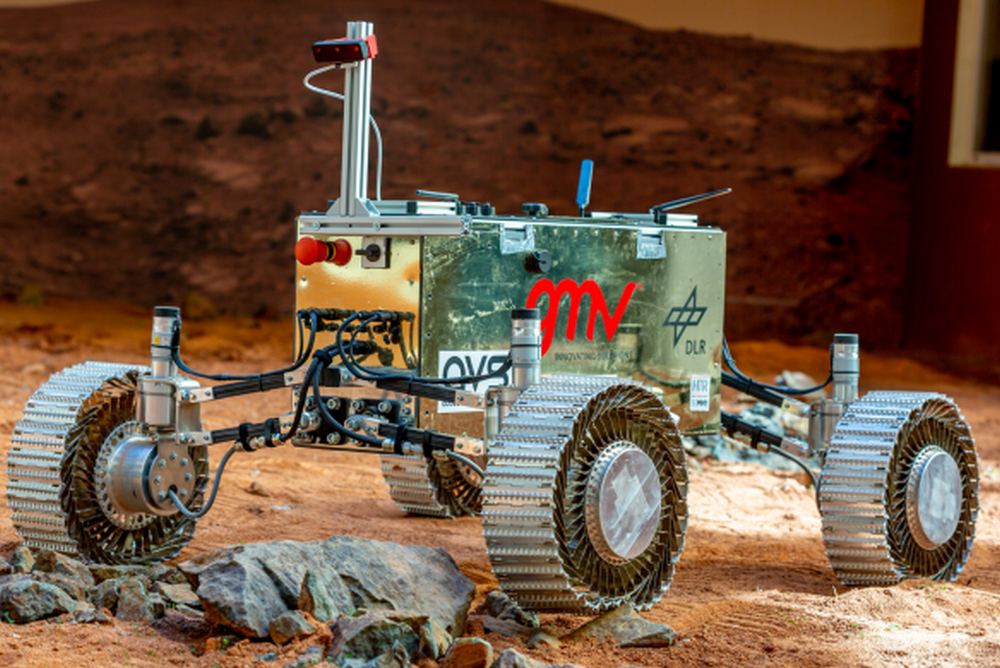
When it comes to mobility, the new rovers will rely on Adaptable Wheels for Exploration (AWE) designed by Hellenic Technology of Robotics (HTR). “Rover wheels play a pivotal role, especially given the
challenging lunar surface conditions and regolith,” the paper states. There’s plenty of loose sand on the Moon, and AWE will supply enough traction. The wheels have caterpillar-style tracks on top of springs and a fixed internal hub. These wheels are remarkably flexible and will be tough enough to meet the mission’s requirements, including being built with materials that can handle the wild temperature swings on the lunar surface.

The rover’s four wheels are just part of the mobility design. The steering system is just as important. There are two potential steering system designs: on-top steering and on-side steering. The ESA has chosen on-side steering partly because it’s more compatible with upper payload bay volume.
On-side steering allows for four different turning modes: Skid Steering, Ackermann Turn, Crab Turn, and Point Turn.

The suspension system will be a hybrid of passive and active, with an independent suspension for each wheel. “The independent, active suspension enables a wheel-walking mode, and coupled with the independent steering even a’ paddling’ mode,” the paper states. Paddling mode provides a safeguard in case the rover gets stuck in very soft terrain. Getting stuck in soft ground is one of the most challenging scenarios for conventional passive suspension systems.
The suspension design also allows for the rover’s stored configuration during spaceflight.

When it comes to the modular rover’s chassis, the design team proposes a strong and lightweight Carbon Fiber Reinforced Polymer (CFRP) design. The chassis will have four separate bays. The primary bay is common among all rovers and will hold the common avionics, thermal control systems, and power components. There will also be two side bays and a top bay, all able to hold different payloads.

The rover will have onboard software (OBSW) that will allow it to drive autonomously. It’ll be able to detect and identify different obstacles and objects and determine its way through, around, or over them. “It also has manipulation capabilities, allowing it to perform ISRU tasks, manipulate tools, and scientific sampling,” the paper states. Astronaut time is valuable, and the more autonomous the rovers can be, the more time astronauts will have for other tasks.
The paper points out that rover modularity starts paying off well before a rover is ever deployed. “The modular design of our prototype provides a unique advantage by allowing us to evaluate the rover’s locomotion and software in tandem with a variety of scientific payloads,” it states. That’s extremely valuable since the payloads could variously consist of things like drills, bulldozer blades, spectrometers and cameras.
The modular rover design is still in the concept phase, though test models have been built and tested.
“A series of rigorous obstacle and excavation tests has been carried out, shedding light on the remarkable capabilities of the EMRS system configuration,” the paper states. “These tests not only demonstrate the rover’s ability to safely navigate lunar terrain but also underscore its proficiency in lunar regolith excavation.”
The ESA is developing some ambitious plans not only for lunar exploration but for a sustained human presence on the Moon. Rovers will be the workhorse for these activities, and the modular design should give the rovers an advantage.
We’ll find out in a few years when the ESA lands on the Moon.
The details of the EMRS design process are in two new papers:
- Modularity for lunar exploration: European Moon Rover System Pre-Phase A Design and Field Test Campaign Results
- The European Moon Rover System: a modular multipurpose rover for future complex lunar missions
The post ESA is Testing a Modular Multipurpose Rover that Could Be a Science Lab or a Tiny Bulldozer appeared first on Universe Today.
November 11, 2023 at 01:09AM
via Universe Today read more...


Post a Comment